Experimental balloon payload
Over the last year i have been monitoring the UKHAS group balloon launches with interest, originally the interest was the tracking of the telemetry signal from distance but now i also have an interest about the harware side of it and how it works!
My simple idea? was to create a micro payload less than 15g in weight, nowhere near as large scale to require a weather balloon for enough lift but to use a fairly small helium filled party balloon...
My thoughts on the theory of which i am no expert!!
A standard 8" latex balloon when fully inflated has about 7g of 'lift' as the density of helium is less than air, naturally the less dense air rises up.
A fully inflated balloon will not get very high until it bursts, when you go up in height from eath the atmospheric pressure drops so the gas inside the balloon expands. Now as we have the balloon already fully inflated a small amount of expansion will cause it to burst, this is why all high (not in my case!) altitude balloons are only part inflated to give room for expansion at altitude.
At just over 5km above the earth the air pressure is half of what it is at sea level, so if a balloon was inflated to half of it's full volume it would have room for the gas inside to double in volume before the balloon bursts making it possible for a very small balloon to get quite high if only a small amount of lift is needed.
The above will never be totally true as the very low temperature and imperfections in the balloon will likely cause it to burst earlier than expected.
If we take this into consideration for 10g of lift plus some extra to make it ascend we need >10g of lift.
One 18" balloon half filled may be close.
The payload had me thinking about the basics to keep it light, there are no expensive parts and all parts are fairly easy to come by for reproduction. Usually flights are using Arduino development boards with a AVR and breakout board which would weigh more than 10g to start with so i opted to make my own minature pcb with processor and sensor on.
Processor:
PIC 16F688, 8MHz clock, ADC's etc..
Sensors:
BMP085 Pressure sensor, has internal temperature sensor too.
DB18B20 Temperature sensor for external readings.
Battery voltage read by processor ADC.
Transmitter:
QFM-TX by Quasar, ~6dBm o/p power, 434.150MHz, most basic transmiter available, have to modify to get small shift for RTTY.
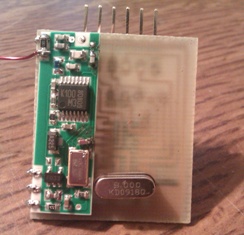
Tx now replaced with RFM22.
Antenna:
Inverted V dipole.
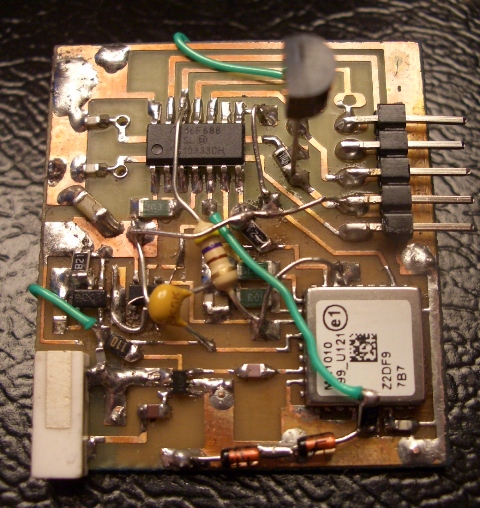
Photo:
Pic Code:
There you have it, a very simple telemetry sender for a micro balloon.... one day i might get to test it!
OR you could build one and launch it yourself, dont forget to let me know how it goes!
New year 2012 update
Over the last week or so i have managed to get the GPS version built up much smaller this time.. still lots of developemnt errors but it works reasonably well in free space with it's tiny gps antenna!
Code is similar but with gps bits added and some slow hellschreiber mode added just for fun after seing a recent 'pico' launch!
Still the 16F688 is used, now without the crystal. the GPS is an MN1010 which is now obsolete but equivilents are available.
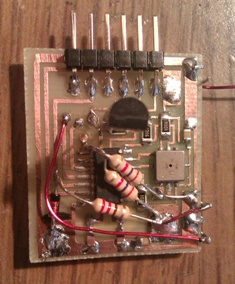
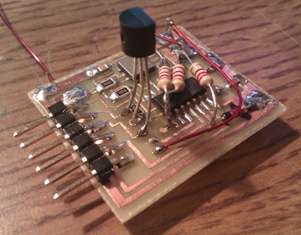
Telemetry board plus RFM22 TX module on the back is 7.3g, add a 180mAh LiPo and you have ~12grammes.. pretty cool!
Some photos..